C# roguelike, devlog 4: Corridors
Introduction
Now that some pathfinding algorithms are in place it’s time to move on to the next step, making corridors between the rooms.
Implementation
Upon creation a corridor should take two points on the Map as arguments and then walk step by step from the start location to the end location and generate walkable space along the way. Placing a door when exiting or entering a room. Additionally to avoid duplicate paths a corridor should only be made between two rooms if no path between the rooms already exits.
I’ll add a new Corridor class with x & y coordinates, width & height dimensions and a reference to the parent node. The Corridor data will be stored in a 2D area array similar to how areas are stored in in Room and Map, and additionally the corridor will have a list of doors with each door stored as a single-number coordinate int.
In the constructor the two points given as arguments are evaluted. If the first point is to the right of the second point they get switched so that point 0 (x0 & y0) is always to the left of point 1 (x1 & y1). Then a check is made to see if point 0 is above or below point 1. Let’s imagine a box drawn between the two points. The x and y values of the Corridor are set to the upper-left corner of the box, the width & height are set to the width & height of the imagined box, and the area is set to a new 2D array with the same dimensions. Then the Generate() method gets called with a startPointBelow bool as an argument, indicating if point 0 is below point 1.
- The
Generate()method sets a start point and a goal point, it then proceeds to walk the entire distance by callingWalkUp(),WalkRight()andWalkDown()in a loop until the goal point is reached. There is a random chance that a walk is interrupted from time to time, resulting in corridors that are not always straight, but sometimes cornered. The corridor generation is done in chunks, collision checks are performed on every step of the walk to check if the current location or its immediate neighbors are already defined as walkable space in a previously made room or corridor. If a location of previously made walkable space is reached the current chunk is ended and evaluated. The evaluation checks if a valid path already exists between the start point of the chunk and the end point. If a valid path already exits the chunk is discarded, but if a valid path does not already exist then the chunk is added to theareaand becomes part of the final Corridor. The process is repeated chunk by chunk until the final goal point is reached. WalkUp(),WalkRight()andWalkDown()walks location by location from a given point towards a given point. On each step there is a small chance that the walk is interrupted. And each location on each step of the way is processed by callingHandleLocation().HandleLocation()checks if the current location and its neighbors are already walkable space in a previously made room or corridor. It tracks the exiting and entering of rooms along the walk and places doors when exiting or entering. It also tellsGenerate()to end the current chunk when reaching, on the current location or on its neighboring locations, already walkable space.
In the PathGraph class I’ll add a method for adding corridors to the graph.
I’ll modify the BspNode class and add a corridor class to it, plus adding a method HasCorridor() that checks if there is a corridor for the current node.
In the BspTree class I’ll add a GenerateCorridor() method that get’s called for all nodes after the rooms have been added to the PathGraph, and some methods for collision checking, to see if a given point in the tree is part of a room or a corridor and if it is walkable space.
GenerateCorridor()This method only runs on nodes that have children. It finds the room in the rightmost leaf of the left side child and room in the leftmost leaf of the right child of a given node. It then picks a random point in each of the two rooms, checks if a valid path exists between them, and if no path already exists then a new corridor is created between the rooms.CheckCollision()Checks if a given point is within a room or a corridor and returns the nullable bool from the selected point, where null is, as before, void space, but true and false is flipped, so true means wall collision found and a false value means open space. The method can check for rooms and corridors at the same time, or check only rooms or only corridors depending on the given arguments. The check is performed on a given node and recursively checks all child nodes.CheckCollisionAll()Performs collision check for all nodes in the entire tree by callingCheckCollision()on the root node.
Finally in the Map class I’ll add some new methods for adding the corridors of the tree to the map.
├── Roguelike.csproj
└── src
├── BspNode.cs
├── BspTree.cs
├── + Corridor.cs
├── Game.cs
├── Map.cs
├── PathGraph.cs
├── Rand.cs
├── Room.cs
└── Vec2.cs
...
// Build the map
private void BuildMap() {
// Build all rooms
tree.VisitAllNodes(BuildRoom);
+ // Build all corridors
+ tree.VisitAllNodes(BuildCorridor);
}
+ // Add a door to the map
+ public void AddDoor(int x, int y)
+ {
+ int coord = MapCoord(x, y);
+ if (map[x, y] == true)
+ {
+ // Add door here
+ }
+ }
// Build room from a node
private void BuildRoom(BspNode node)
{
if (node.HasRoom())
{
Room room = node.room;
BuildSpace(room.x, room.y, room.width, room.height, room.area);
}
}
+ // Build corridor from a node
+ private void BuildCorridor(BspNode node)
+ {
+ // Build corridor
+ if (node.HasCorridor())
+ {
+ Corridor corridor = node.corridor;
+ BuildSpace(corridor.x, corridor.y, corridor.width, corridor.height, corridor.area);
+
+ // Add doors
+ foreach (Vec2 door in corridor.doors)
+ {
+ AddDoor(corridor.x + door.x, corridor.y + door.y);
+ }
+ }
+ }
...
...
// Constructor
public BspTree(Map map, int width, int height, int x = 0, int y = 0)
{
this.id = count;
count++;
this.x = x;
this.y = y;
this.width = width;
this.height = height;
this.map = map;
// Generate all nodes and rooms
this.root = new BspNode(this, width, height);
// Generate pathfinding graph for all the rooms
AddAllRoomsToPathGraph();
+ // Generate corridors
+ VisitAllNodes(GenerateCorridor);
// Print info for all nodes
VisitAllNodes(NodeInfo);
}
+ // Generate a corridor for the current node, between the rightmost leaf of the left child, and the leftmost leaf of the right child
+ private void GenerateCorridor(BspNode node)
+ {
+ if (node.children[0] != null && node.children[1] != null)
+ {
+ // Set start and endpoints for the corridor
+ Room roomFirst = FindRightLeaf(node.children[0]).room;
+ Room roomSecond = FindLeftLeaf(node.children[1]).room;
+ int x0 = roomFirst.x + Math.Min(roomFirst.width - 1, Rand.random.Next(2, roomFirst.width - 3));
+ int y0 = roomFirst.y + Math.Min(roomFirst.height - 1, Rand.random.Next(2, roomFirst.height - 3));
+ int x1 = roomSecond.x + Math.Min(roomSecond.width - 1, Rand.random.Next(2, roomSecond.width - 3));
+ int y1 = roomSecond.y + Math.Min(roomSecond.height - 1, Rand.random.Next(2, roomSecond.height - 3));
+
+ // Check if path already exists between startpoint and endpoint, if path doesn't exist make new corridor
+ if (!map.pathGraph.BfsCheck(map.MapCoord(x0, y0), map.MapCoord(x1, y1)))
+ {
+ node.corridor = new Corridor(node, x0, y0, x1, y1 );
+ map.pathGraph.AddCorridor(node.corridor, modifyNeighbors: true);
+ }
+ }
+ }
+
+ // Check all nodes if a given point is inside a room
+ public bool? CheckCollisionAll(int x, int y, bool room = true, bool corridor = true)
+ {
+ // Check if within map bounds
+ if ((room || corridor) && (x > 0 || x < map.width || y > 0 || y < map.height))
+ {
+ // Perform collision check
+ return CheckCollision(root, x, y, room, corridor);
+ }
+
+ // Return null if out of bounds
+ return null;
+ }
+
+ // Check if given point is inside a room in a given node, if no collision found recursivly check all child nodes
+ public bool? CheckCollision(BspNode node, int x, int y, bool room = true, bool corridor = true)
+ {
+ bool? collisionFound = null;
+
+ // Check for collision in room
+ if (collisionFound == null && node.room != null && room == true)
+ {
+ Room r = node.room;
+ if ((x >= r.x) && (x < r.x + r.width) && (y >= r.y) && (y < r.y + r.height))
+ {
+ collisionFound = r.area[x-r.x, y-r.y];
+ if (collisionFound == true) { collisionFound = false; }
+ else if (collisionFound == false) { collisionFound = true; }
+ }
+ }
+
+ // Check for collision in corridor
+ if (collisionFound == null && node.corridor != null && corridor == true)
+ {
+ Corridor c = node.corridor;
+ if ((x >= c.x) && (x < c.x + c.width) && (y >= c.y) && (y < c.y + c.height))
+ {
+ collisionFound = c.area[x-c.x, y-c.y];
+ if (collisionFound == true) { collisionFound = false; }
+ else if (collisionFound == false) { collisionFound = true; }
+ }
+ }
+
+ // Check for collision in children nodes recursively
+ if (collisionFound == null && node.children[0] != null) { collisionFound = CheckCollision(node.children[0], x, y, room, corridor); }
+ if (collisionFound == null && node.children[1] != null) { collisionFound = CheckCollision(node.children[1], x, y, room, corridor); }
+
+ // Return collision
+ return collisionFound;
+ }
...
...
// Node data
public Room room { get; private set; } = null;
+ public Corridor corridor { get; set; } = null;
...
// Return true if this node has a room
public bool HasRoom()
{
if (room != null) { return true; }
return false;
}
+ // Return true if this node has a corridor
+ public bool HasCorridor()
+ {
+ if (corridor != null) { return true; }
+ return false;
+ }
...
...
// Add all visitable locations from a room
public void AddRoom(Room room, bool modifyNeighbors = false)
{
AddArea(room.x, room.y, room.width, room.height, room.area, modifyNeighbors);
}
+ // Add all visitable locations from a corridor
+ public void AddCorridor(Corridor corridor, bool modifyNeighbors = false)
+ {
+ AddArea(corridor.x, corridor.y, corridor.width, corridor.height, corridor.area, modifyNeighbors);
+ }
...
namespace Roguelike;
/// <summary>
/// A corridor between two spaces.
/// </summary>
public class Corridor
{
public readonly int x;
public readonly int y;
public readonly int width;
public readonly int height;
// Parent node
public readonly BspNode node;
// Corridor data
public bool?[,] area { get; private set; }
public List<Vec2> doors { get; private set; } = new List<Vec2>();
// Constructor
public Corridor(BspNode node, int x0, int y0, int x1, int y1)
{
// Make sure startpoint is to the left of endpoint
if (x0 > x1)
{
int xTemp = x0;
int yTemp = y0;
x0 = x1;
y0 = y1;
x1 = xTemp;
y1 = yTemp;
}
int x = x0;
int y = y0;
// Check if startpoint is below endpoint
bool startPointBelow = false;
if (y0 > y1)
{
startPointBelow = true;
y = y1;
}
int width = Math.Abs(x0 - x1) + 1;
int height = Math.Abs(y0 - y1) + 1;
this.x = x;
this.y = y;
this.node = node;
this.width = width;
this.height = height;
this.area = new bool?[width, height];
// Generate corridor
Generate(startPointBelow);
}
// Check for collision and try to place tile at current position
private bool HandleLocation(int x, int y, int xPrev, int yPrev, ref bool? collisionRoomPrev, bool?[,] chunkArea, List<Vec2> chunkDoors, ref bool tryFinishChunk)
{
// Check collision
bool? collisionRoom = node.tree.CheckCollisionAll(this.x + x, this.y + y, room: true, corridor: false);
bool? collisionCorridor = node.tree.CheckCollisionAll(this.x + x, this.y + y, room: false, corridor: true);
// Check if entered or exited room and corridor
bool enteredRoom = false;
bool exitedRoom = false;
if (collisionRoom != null && collisionRoomPrev == null) { enteredRoom = true; }
if (collisionRoom == null && collisionRoomPrev != null) { exitedRoom = true; }
// Check for collision in neighbors
bool? collisionUp = node.tree.CheckCollisionAll(this.x + x, this.y + y - 1);;
bool? collisionDown = node.tree.CheckCollisionAll(this.x + x, this.y + y + 1);;
bool? collisionLeft = node.tree.CheckCollisionAll(this.x + x - 1, this.y + y);;
bool? collisionRight = node.tree.CheckCollisionAll(this.x + x + 1, this.y + y);;
// Group collisions
bool collisionAllAny = (collisionCorridor != null || collisionRoom != null || collisionUp != null || collisionDown != null || collisionLeft != null || collisionRight != null);
bool collisionAllVisitable = (collisionCorridor == false || collisionRoom == false || collisionUp == false || collisionDown == false || collisionLeft == false || collisionRight == false);
// Set current location to open space
chunkArea[x, y] = true;
// Add door when exiting room
if (exitedRoom) { chunkDoors.Add(new Vec2(xPrev, yPrev)); }
// Add door when entering room
if (enteredRoom) { chunkDoors.Add(new Vec2(x, y)); }
// Set the prev collisions
collisionRoomPrev = collisionRoom;
// Finish the chunk when reaching a visitable space
if (collisionAllVisitable && tryFinishChunk) { return true; }
// Try to end the chunk after entering a room or a corridor
if (collisionRoom != false && collisionCorridor != false) { tryFinishChunk = true; }
return false;
}
// Make corridor from bottom to top
private bool WalkUp(ref int x, ref int y, ref int xPrev, ref int yPrev, int xGoal, int yGoal, ref bool? collisionRoomPrev, bool?[,] chunkArea, List<Vec2> chunkDoors, ref bool tryFinishChunk)
{
while (y > yGoal)
{
if (Rand.Percent(10)) { return false; }
if (HandleLocation(x, y, xPrev, yPrev, ref collisionRoomPrev, chunkArea, chunkDoors, ref tryFinishChunk)) { return true; }
xPrev = x;
yPrev = y;
y--;
}
return false;
}
// Make corridor from top to bottom
private bool WalkDown(ref int x, ref int y, ref int xPrev, ref int yPrev, int xGoal, int yGoal, ref bool? collisionRoomPrev, bool?[,] chunkArea, List<Vec2> chunkDoors, ref bool tryFinishChunk)
{
while (y < yGoal)
{
if (Rand.Percent(10)) { return false; }
if (HandleLocation(x, y, xPrev, yPrev, ref collisionRoomPrev, chunkArea, chunkDoors, ref tryFinishChunk)) { return true; }
xPrev = x;
yPrev = y;
y++;
}
return false;
}
// Make corridor from left to right
private bool WalkRight(ref int x, ref int y, ref int xPrev, ref int yPrev, int xGoal, int yGoal, ref bool? collisionRoomPrev, bool?[,] chunkArea, List<Vec2> chunkDoors, ref bool tryFinishChunk)
{
while (x < xGoal)
{
if (Rand.Percent(10)) { return false; }
if (HandleLocation(x, y, xPrev, yPrev, ref collisionRoomPrev, chunkArea, chunkDoors, ref tryFinishChunk)) { return true; }
xPrev = x;
yPrev = y;
x++;
}
return false;
}
// Generate corridor
private void Generate(bool startPointBelow)
{
// Set initial values
int x = 0;
int xGoal = width - 1;
// The default is to draw corridor from top-left to bottom-right
int y = 0;
int yGoal = height - 1;
// But if the startpoint is below the endpoint the corridor is drawn from bottom-left to top-right
if (startPointBelow)
{
y = yGoal;
yGoal = 0;
}
// Draw the corridor chunk by chunk
int xPrev = x;
int yPrev = y;
bool? collisionRoomPrev = node.tree.CheckCollisionAll(this.x + x, this.y + y, room: true, corridor: false);
while (x != xGoal || y != yGoal)
{
// Start new chunk, end chunk when reaching a new room
bool validChunk = false;
bool?[,] chunkArea = new bool?[width, height];
List<Vec2> chunkDoors = new List<Vec2>();
int xChunk = x;
int yChunk = y;
bool chunkDone = false;
bool tryFinishChunk = false;
while (!chunkDone && (x != xGoal || y != yGoal))
{
if (!chunkDone && yGoal < y) { chunkDone = WalkUp(ref x, ref y, ref xPrev, ref yPrev, xGoal, yGoal, ref collisionRoomPrev, chunkArea, chunkDoors, ref tryFinishChunk); }
if (!chunkDone && xGoal > x) { chunkDone = WalkRight(ref x, ref y, ref xPrev, ref yPrev, xGoal, yGoal, ref collisionRoomPrev, chunkArea, chunkDoors, ref tryFinishChunk); }
if (!chunkDone && yGoal > y) { chunkDone = WalkDown(ref x, ref y, ref xPrev, ref yPrev, xGoal, yGoal, ref collisionRoomPrev, chunkArea, chunkDoors, ref tryFinishChunk); }
}
// Check if start location is valid, if not valid then check neighbors
int xStart = this.x + xChunk;
int yStart = this.y + yChunk;
bool validStartPos = node.tree.map.pathGraph.HasLocation(node.tree.map.MapCoord(xStart, yStart));
// Check position above
if (!validStartPos && (yStart > 0))
{
if (validStartPos = node.tree.map.pathGraph.HasLocation(node.tree.map.MapCoord(xStart, yStart - 1)))
{
yStart = yStart - 1;
}
}
// Check position below
if (!validStartPos && (yStart + 1 < node.tree.map.height))
{
if (validStartPos = node.tree.map.pathGraph.HasLocation(node.tree.map.MapCoord(xStart, yStart + 1)))
{
yStart = yStart + 1;
}
}
// Check position left
if (!validStartPos && (xStart > 0))
{
if (validStartPos = node.tree.map.pathGraph.HasLocation(node.tree.map.MapCoord(xStart - 1, yStart)))
{
xStart = xStart - 1;
}
}
// Check position right
if (!validStartPos && (xStart + 1 < node.tree.map.width))
{
if (validStartPos = node.tree.map.pathGraph.HasLocation(node.tree.map.MapCoord(xStart + 1, yStart)))
{
xStart = xStart + 1;
}
}
// Check if end location is valid, if not check neighbors
int xEnd = this.x + x;
int yEnd = this.y + y;
bool validEndPos = node.tree.map.pathGraph.HasLocation(node.tree.map.MapCoord(xEnd, yEnd));
// Check position above
if (validStartPos && !validEndPos && (yEnd > 0))
{
if (validEndPos = node.tree.map.pathGraph.HasLocation(node.tree.map.MapCoord(xEnd, yEnd - 1)))
{
yEnd = yEnd - 1;
}
}
// Check position below
if (validStartPos && !validEndPos && (yEnd + 1 < node.tree.map.height))
{
if (validEndPos = node.tree.map.pathGraph.HasLocation(node.tree.map.MapCoord(xEnd, yEnd + 1)))
{
yEnd = yEnd + 1;
}
}
// Check position left
if (validStartPos && !validEndPos && (xEnd > 0))
{
if (validEndPos = node.tree.map.pathGraph.HasLocation(node.tree.map.MapCoord(xEnd - 1, yEnd)))
{
xEnd = xEnd - 1;
}
}
// Check position right
if (validStartPos && !validEndPos && (xEnd + 1 < node.tree.map.width))
{
if (validEndPos = node.tree.map.pathGraph.HasLocation(node.tree.map.MapCoord(xEnd + 1, yEnd)))
{
xEnd = xEnd + 1;
}
}
// If both the start and end positions of the chunk is valid check if a path exists between the points
if (validEndPos && validStartPos) { validChunk = !node.tree.map.pathGraph.BfsCheck(node.tree.map.MapCoord(xStart, yStart), node.tree.map.MapCoord(xEnd, yEnd)); }
else { validChunk = false; }
// Add chunk to the main area if path to chunk doesn't exist
if (validChunk)
{
// Add doors
doors.AddRange(chunkDoors);
// Add chunk area
for (int yC = 0; yC < height; yC++)
{
for (int xC = 0; xC < width; xC++)
{
if (chunkArea[xC, yC] != null)
{
area[xC, yC] = chunkArea[xC, yC];
}
}
}
}
}
}
}
Conclusion
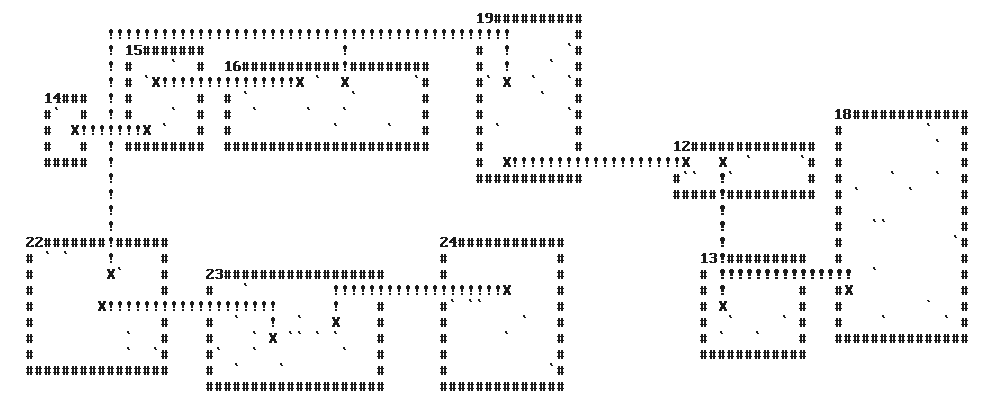
And that’s it, corridors are now made between all the rooms connecting them together. It might not be a super fast and efficient implementation and it might not result in ideal gameplay (backtracking), but it’ll do for now.
lzzrhx@arch:~/Roguelike $ dotnet run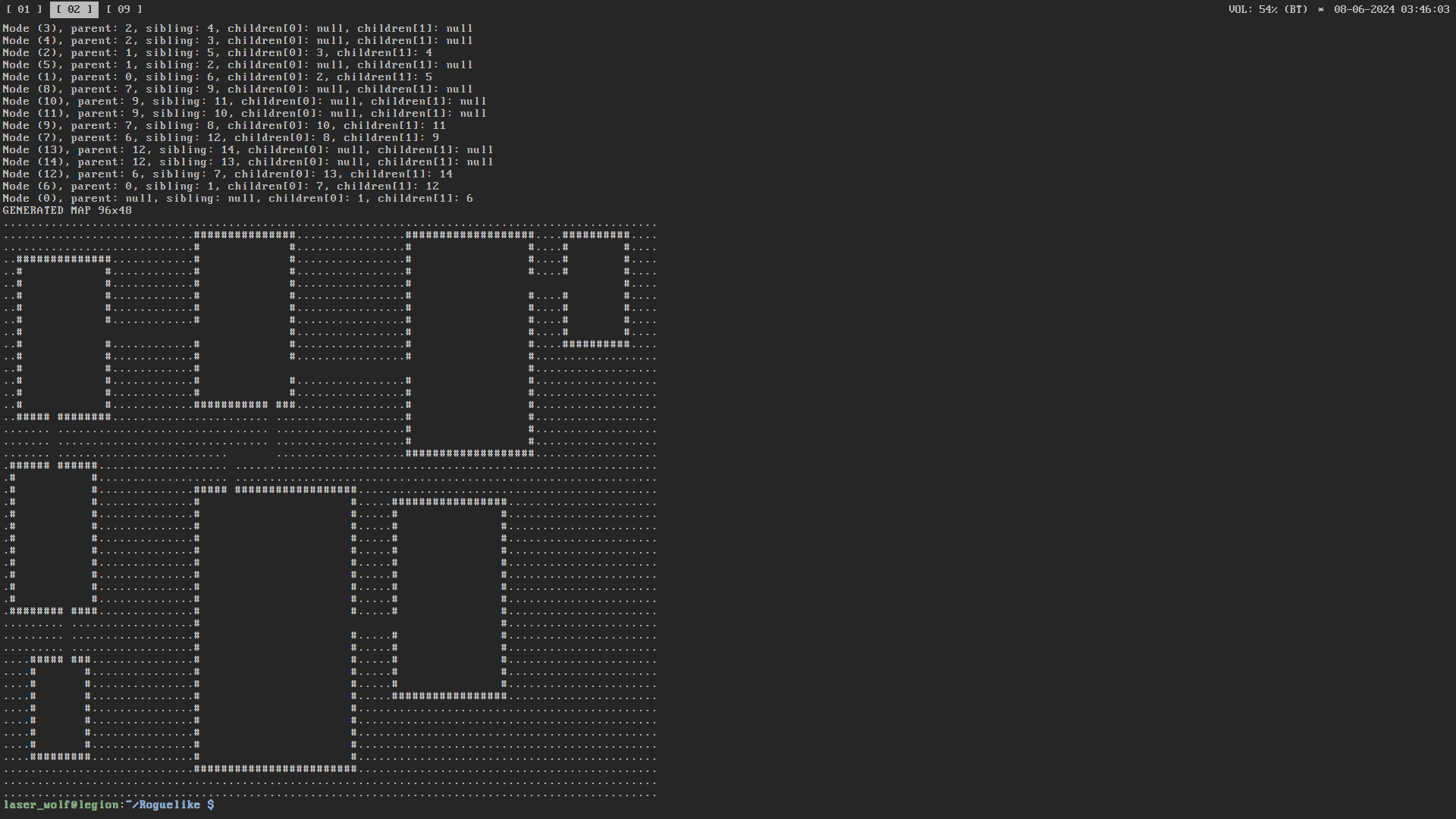
Download the source code: roguelike-devlog4.zip
Find the project on GitHub: lzzrhx/roguelike